Biologisch inspirierte kognitive Soft-Roboter – Mit Kooperation zum Erfolg. Einblicke in unser Projekt „BIOIC“ zum dritten Advisory Board Meeting in Dresden.
Since this meeting was held with our colleagues from Italy we decided to share this article in English as well – please see below.
Ende September 2024 fand das dritte Advisory Board Meeting des Projekts BIOIC (Bioinspired soft robotic systems for cognitive production) in Dresden statt. Wissenschaftlerinnen und Wissenschaftler des Fraunhofer IWU und der Università degli Studi di Napoli Federico II trafen sich mit Vertretern aus Industrie und Wissenschaft, um gemeinsam aktuelle Fortschritte und die Verwertung der Projektergebnisse zu diskutieren. Über bisherige Treffen mit den Projektpartnern lesen Sie hier: (1), (2) und (3).
Ziele des Treffens
Beim zweitägigen Treffen wurden in Präsentationen und Demonstrationen die aktuellen Fortschritte der BioiC-Technologieplattformen vorgestellt. In einem Workshop, unterstützt durch das Advisory Board und das Steering Committee, hatten die Projektteilnehmenden zudem die Gelegenheit, neue Impulse für die nächste Projektphase zu setzen. Dabei wurden Nebenprojekte und bereits erfolgte Technologietransfers diskutiert sowie ein Konzept für die zukünftige Verwertung der Projektergebnisse erarbeitet. Offene Forschungsfragen und gemeinsame Kernelemente der Technologien wurden identifiziert, um den Ausgangspunkt für eine Weiterführung der Themen in neuen gemeinsamen Projekten zu bilden. Dafür wurden für die BioiC-Technologieplattformen jeweils eine konkrete Projektidee samt Abstract, passenden Fördermöglichkeiten und der Einbindung neuer Partner erarbeitet. Es ergaben sich Projektideen zur Entwicklung von Aktoren mit variabler Steifigkeit für kollaborative Roboter, zur optimierten Herstellung für die Minimierung von Leckage beim pneumatischen „Soft Growing Robot“, zur Entwicklung eines Serviceroboters durch Kombination mobiler Maschinen mit dem Kontinuumroboter und zur Weiterentwicklung des weichen Robotergreifers für Anwendungen wie Gesundheitsfürsorge und Haushaltshilfe. Ein besonderer Schwerpunkt lag auch auf dem persönlichen Austausch mit den italienischen Partnern.


Was ist Bioinspiration?
Eine der Kernfragen des Meetings war, wie wir Bioinspiration definieren, in unserem Projekt umsetzen und mit den Projektergebnissen nach außen tragen wollen. Robotervisionen sind oft komplex, beginnen jedoch meist mit einfachen Ideen aus der Natur, die schrittweise zu komplexen Lösungen werden. Bioinspiration kann unterschiedlich aussehen: Zum einen können biologische Systeme mit ihren Funktionen (Mechanismus, Funktionsprinzip, Form, Material) ganz oder auch nur teilweise kopiert werden, zum anderen können auch komplexere biologische Zell-Kombinationen und Architekturen als Vorbild genommen werden, um modulare und auch intelligente, kognitive und anpassungsfähige Systeme mit unterschiedlichen Funktionen zu entwickeln. Die Kollaboration einzelner Komponenten mit ihren individuellen Stärken ist hier die Lösung.

Kollaboration
Passend dazu startete der zweite Tag des Treffens in unserem Versuchsfeld mit Demonstrationen zu den Technologieplattformen, die im Projekt bearbeitet werden. Dabei lag der Fokus vor allem auf der Kooperation mehrerer Technologien miteinander. Im Sommer 2024 besuchte unsere Kollegin Benedetta Maria Vita Ostuni aus Neapel das Fraunhofer IWU in Dresden, um gemeinsam den zweiarmigen gelenknachgiebigen Industrieroboter mit den pneumatisch angetriebenen weichen Greifern zu kombinieren. Sie hatte so außerdem die Gelegenheit, zwei Wochen in unseren Forschungsalltag einzutauchen und auch Dresden und das Leben hier kennenzulernen. Die Kombination gelang durch die Kommunikation über eine OPC-UA Schnittstelle und eine implementierte fähigkeitsbasierte Steuerung. Der Zweiarmroboter konnte so erfolgreich verschiedene Früchte manipulieren und übergeben, doch sehen Sie selbst:
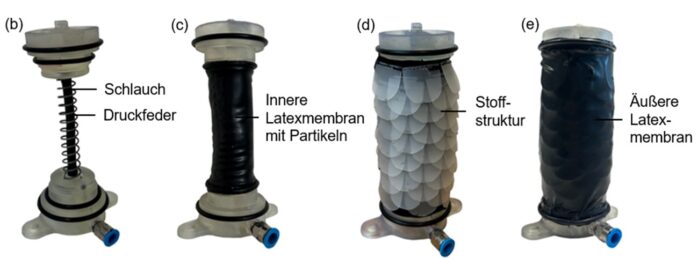
Außerdem wurde die neu entwickelte magnetische Kappe für den mobilen „Soft Growing Robot“ mit integrierter Kamera und Beleuchtung für die Erkundung schwer zugänglicher Umgebungen vorgestellt. In der anschließenden Demonstration konnte das Prinzip der Partikel- und Schichtverspannung für eine variable Steifigkeit des strukturnachgiebigen Kontinuumroboters mit eignen Händen erfühlt werden. In zukünftigen Projekten soll die mit den Kontinuumrobotern entwickelten Prinzipien in den weich wachsenden Roboter integriert werden.


Perspektiven und nächste Schritte
Der Fokus der finalen Projektphase liegt auf der wissenschaftlichen und der industriellen Verwertung der generierten Ergebnisse. Dafür ist ein Benchmarking der Technologien hinsichtlich ihrer Bioinspiration, Kognition und Wettbewerbsfähigkeit erforderlich. Ein geplanter Workshop soll im Rahmen eines Symposiums das Interesse der Industrie an unseren Ergebnissen wecken und industrielle Anwendungen unserer Lösungen identifizieren. Parallel wird die wissenschaftliche Sichtbarkeit durch die gemeinsame und gezielte Verbreitung der Ergebnisse, sowie die Ausbildung von Nachwuchswissenschaftlern gestärkt. Die Beantragung weitere kooperativer Folgeprojekte basierend auf gemeinsamen Kernelementen oder weißen Flecken der Technologien wird angestrebt. Wir freuen uns auf eine wachsende Kollaboration, um gemeinsame neue Ideen und Lösungen für die Zukunft entwickeln, zu den wir Sie hier auf dem Laufenden halten.

Wollen Sie mehr über biologisch inspirierte kognitive Soft-Roboter erfahren, oder bei zukünftigen Projekten mitwirken? Kontaktieren Sie uns und werden Sie Teil unserer Community. Oder folgen Sie uns auf unseren sozialen Kanälen für mehr Informationen und aktuelle Updates. Sie erreichen uns auf LinkedIn, oder via E-Mail unter tobias.krueger@iwu.fraunhofer.de.
Bilder: © Fraunhofer IWU
What progress has been made in biologically inspired robotics? An update from the BioiC project
Biologically inspired cognitive soft robots – Cooperation for success. Insights into our “BIOIC” project at the third Advisory Board Meeting in Dresden.
The third Advisory Board Meeting of the BIOIC project (Bioinspired soft robotic systems for cognitive production) took place in Dresden at the end of September. Scientists from the Fraunhofer IWU and the Università degli Studi di Napoli Federico II met with representatives from industry and science to discuss current progress and the utilization of the project results. You can read about previous meetings with the project partners here: (1), (2) and (3).
Goals of the meeting
During the two days of the meeting, the current progress of the BIOIC technology platforms was presented in presentations and demonstrations. In a workshop, supported by the Advisory Board and the Steering Committee, the project participants also had the opportunity to provide new impetus for the next project phase. Side projects and technology transfers that have already taken place were discussed and a concept for the future exploitation of the project results was developed. Open research questions and common core elements of the technologies were identified to form the starting point for continuing the topics in new joint projects. To this end, a concrete project idea was developed for each of the BIOIC technology platforms, including an abstract, suitable funding opportunities and the involvement of new partners. This resulted in project ideas for the development of actuators with variable stiffness for soft articulated collaborative robots, for optimized manufacturing to minimize leakage in the pneumatic “soft growing robot”, for the development of a service robot by combining mobile machines with the soft continuum robot and for the further development of the soft robotic gripper for applications such as healthcare and home help. A special focus was also placed on the personal exchange with the Italian partners.
What does bioinspiration mean?
One of the key questions of the meeting was how we want to define bioinspiration, implement it in our project and communicate it to the outside world with the project results. Robot visions are often complex, but often start with simple ideas from nature that gradually become complex solutions. Bioinspiration can look different: On the one hand, biological systems with their functions (mechanism, functional principle, form, material) can be copied in whole or in part; on the other hand, more complex biological cell combinations and architectures can also be used as models to develop modular and also intelligent, cognitive and adaptable systems with different functions. The collaboration of individual components with their individual strengths is the solution here.
Collaboration
The second day of the meeting started in our test field with demonstrations of the technology platforms being worked on in the project. The focus was primarily on the cooperation between several technologies. In summer 2024, our colleague Benedetta Maria Vita Ostuni from Naples visited the Fraunhofer IWU in Dresden to jointly combine the two-arm articulated industrial robot with the pneumatically driven soft grippers. This also gave her the opportunity to spend two weeks immersed in our day-to-day research and to get to know Dresden and life here. The combination was successful thanks to communication via an OPC-UA interface and an implemented skill-based control system. The two-armed robot was thus able to successfully manipulate and hand over various fruits, but see for yourself.
The newly developed magnetic cap for the mobile “Soft Growing Robot” with integrated camera and lighting for exploring difficult to reach environments was also presented. In the subsequent demonstration, the principle of particle and layer tensioning for a variable stiffness of the structurally compliant continuum robot could be felt with one’s own hands. In future projects, the principles developed with the continuum robots will be integrated into the soft growing robot.
Prospects and next steps
The focus of the final project phase is on the scientific and industrial exploitation of the results generated. This requires benchmarking the technologies in terms of their bioinspiration, cognition and competitiveness. A planned workshop will be held as part of a symposium to arouse industry’s interest in our results and identify industrial applications for our solutions. At the same time, scientific visibility will be strengthened through the joint and targeted dissemination of results and the training of young scientists. The aim is to apply for further cooperative follow-up projects based on common core elements or white spots in the technologies. We look forward to a growing collaboration to jointly develop new ideas and solutions for the future, which we will keep you up to date on here.
Would you like to learn more about biologically inspired cognitive soft robots or participate in future projects? Contact us and become part of our community. Or follow us on our social channels for more information and the latest updates. You can reach us on LinkedIn, or via email at tobias.krueger@iwu.fraunhofer.de.