Hinter dem Akronym EASYRob steht das Projekt Effiziente erweiterte Systeme und Methoden für die elasto-kinematische Kalibrierung von Robotern. Ziel des Forschungsprojektes ist, ein neuartiges elasto-kinematisches Kalibriersystem bestehend aus Messinstrument, Kalibriermethoden und Software für Industrieroboter zu entwickeln. Maßgeblich ist eine Bedienbarkeit ohne spezielle Fachkenntnisse sowie die schnelle Durchführbarkeit in Betriebspausen an der betriebsbereiten Anlage in beengten Produktionsumgebungen. Da derzeit kein Messinstrument existiert, das diese Anforderungen erfüllt, ist die Entwicklung eines hybriden Messinstruments zentraler Bestandteil des Projekts. Es wird sowohl die Bewertung der Positionier- und Bahngenauigkeit als auch der Nachgiebigkeit von Industrierobotern zulassen. Projektpartner sind die OPW GmbH & Co. KG, Cognibotics AG und die KTH Stockholm.
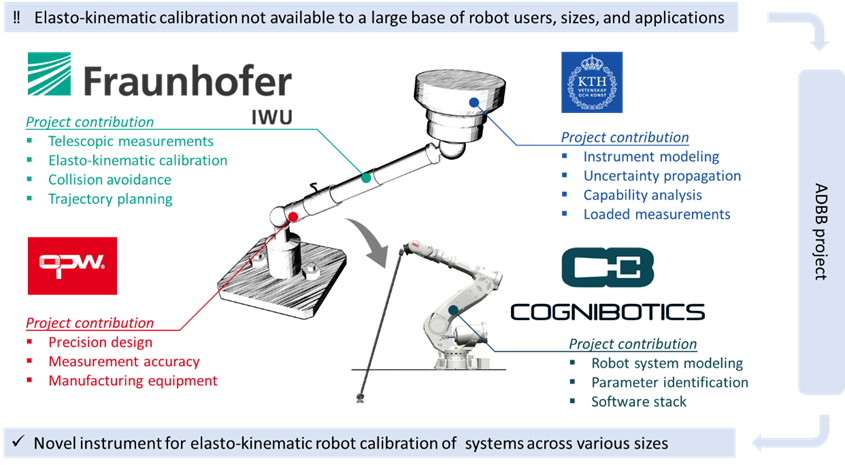
Im Teilprojekt des Fraunhofer IWU steht die Auslegung des neuen Messsystems seitens der geometrischen Kalibrierung, die Planung optimal fehlersensitiver und kollisionsfreier Messtrajektorien sowie die Validierung und Aufschaltung der Korrektur auf Industrierobotern im Fokus. Mit Hilfe der Software soll die Messung geplant, visualisiert und ausgewertet sowie die Korrekturparameter für die Kalibrierung identifiziert werden können.
Unser Kollege Herr Johann Marwitz ist zum Projekt-Kick-Off nach Stockholm gereist und berichtet, dass der Projekt-Kick-Off von EASYRob in den Räumlichkeiten der KTH Stockholm äußerst produktiv war. Während lebhafter Diskussionen über Anforderungen und Design-Entscheidungen für das zu entwickelnde Kalibriersystem wurde die Atmosphäre durch die inspirierende Lab-Tour zusätzlich aufgewertet. Es war besonders erfreulich, die Gelegenheit zu haben, alle Projektmitarbeiter:innen persönlich zu treffen und gemeinsam an diesem vielversprechenden Vorhaben zu arbeiten.
Für Rückfragen und Hinweise steht Ihnen Herr Johann Marwitz gerne unter folgender Mailadresse zur Verfügung: johann.marwitz@iwu.fraunhofer.de.
Headerbild: © Fraunhofer IWU