In der letzten Woche war unser geschätzter Kollege Philip Scharf als Teilnehmer beim Abschlusssymposium “On the Future of Soft Robotics” des DFG Schwerpunktprogrammes Soft Material Robotic Systems – A DFG Priority Programme der Leibniz Universität Hannover dabei.
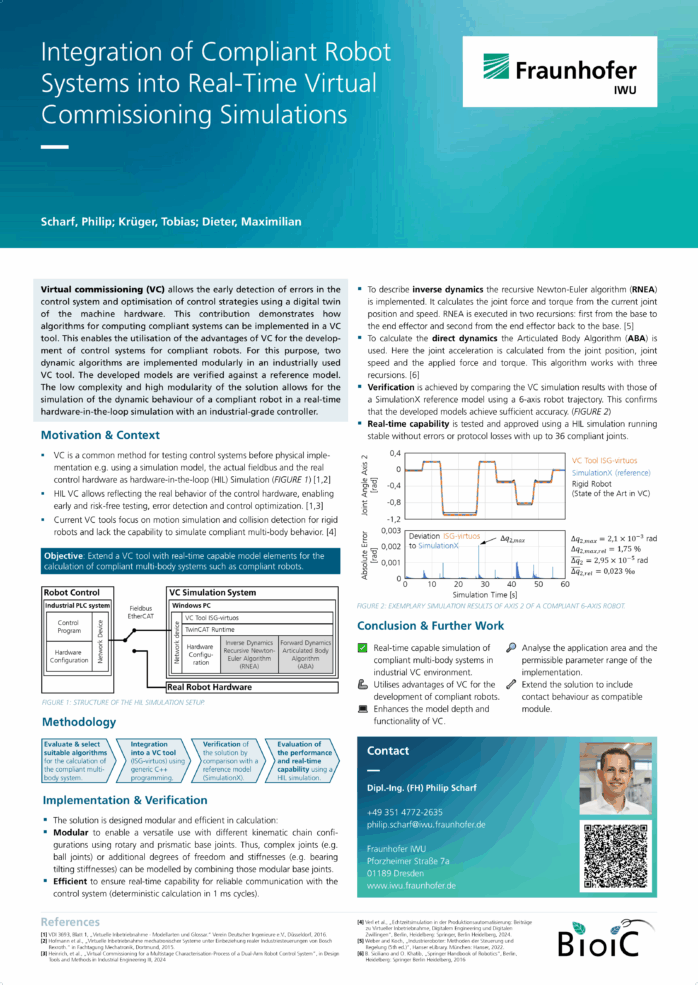
Dort stellte er in einem Teaser-Talk unter dem Titel “Integration of Compliant Robot Systems into Real-Time Virtual Commissioning Simulations” aktuelle Themen zum Transfer von Soft-Robotik-Ansätzen in industrielle Anwendungen vor.

Um was ging es in seinem Beitrag konkret?
Im Projekt BioiC untersuchen wir, welche neuen Anwendungsfälle durch den Einsatz mechanisch nachgiebiger Industrieroboter erschlossen werden können und wie eine Steuerung für solche Roboter gestaltet sein muss. Dazu haben wir einen industrieüblichen Aufbau mit zwei klassischen 6-achsigen Knickarmrobotern aufgebaut und sind dabei, diese mit mechanischen Nachgiebigkeiten in den Gelenken auszustatten.
Um die Steuerungsalgorithmen nicht an den realen Robotern zu entwickeln, die dabei beschädigt oder zerstört werden könnten, verwenden wir ein VIBN-Modell. Damit können wir die Steuerung ohne Risiko vorab testen. Herkömmliche VIBN- Tools stoßen hier allerdings an ihre Grenzen, da Roboter in der Regel als starre Systeme modelliert werden. Deshalb haben wir eigene, modular einsetzbare und besonders recheneffiziente Modellbausteine entwickelt, mit denen sich nachgiebige Mehrkörpersysteme – wie unsere BioiC-Roboter – simulieren lassen. Die Modularität ermöglicht eine einfache Wiederverwendbarkeit der Bausteine – auch für andere Robotertypen wie z.B. 4-Achs-Kinematiken. Die Recheneffizienz ist entscheidend für den Einsatz des nachgiebigen VIBN-Modells in Hardware-in-the-Loop-Szenarien. In solchen Anwendungen wird die reale Steuerung, die normalerweise die Roboter im Versuchsfeld steuert, direkt mit dem Simulationsmodell verbunden. Damit diese Echtzeitkopplung funktioniert, muss das VIBN-Modell innerhalb des Steuerungstaktes von nur 2 Millisekunden neue Signale berechnen und zurücksenden – eine Anforderung, die unser Modell erfolgreich erfüllt.
Durch unsere neuen Modellbausteine kann nun auch die Soft-Robotik von den Vorteilen der VIBN profitieren.
Zurück zum Symposium in Hannover
Linda Weisheit, Wissenschaftliche Mitarbeiterin am Fraunhofer IWU, war ebenfalls vor Ort und stellte in einem weiteren Teaser-Talk unter dem Titel “Development and implementation of a robot structure with adaptive stiffness by combining particle and layer jamming” Forschungsergebnisse ihrer Abteilung Funktionalisierungstechnologien am Fraunhofer IWU vor. Die dazu passenden Demonstratoren waren im Ausstellungsbereich zu sehen und wurden dort vielfach bestaunt und diskutiert.


Es war für beide sehr interessant, aus dem Feld der Grundlagenforschung die neusten Entwicklungen kennenzulernen und mit den Teilnehmenden zu diskutieren, insbesondere auch darüber, wie man das Gehörte und Gesehene sinnvoll und mehrwertbringend in die Industrie transferieren kann.
Wenn Sie an einer Zusammenarbeit interessiert sind, freuen wir uns sehr über eine Kontaktaufnahme.